За последнее десятилетие мы наблюдали замечательную эволюцию робототехники с моделями, которые могут ходить, говорить и жестикулировать, как люди, выполнять задачи от перемещения тяжелой техники до деликатного манипулирования крошечными объектами и сохранять равновесие на двух или четырех ногах на пересеченной и враждебной местности.
Какими бы впечатляющими ни были новейшие роботы, их достижения в значительной степени являются результатом программирования под конкретные задачи или дистанционного обучения от людей.
Исследователи из ETH Zurich разработали программу, которая помогает роботам выполнять действия, которые не зависят от “предварительно записанных демонстраций экспертов”, как выразились разработчики, или “тщательно продуманных вознаграждений”.
Вместо этого они разработали подход, при котором робот может “быстро найти выполнимую и почти оптимальную мультимодальную последовательность, которая решает задачу”. Другими словами, они обеспечивают среду, в которой роботы могут достигать целей с минимальным руководством со стороны людей-операторов.
Об исследовании было сообщено в выпуске журнала Science Robotics от 16 августа. Статья “Универсальное многоконтактное планирование и контроль при манипулировании ногами” была подготовлена Жан-Пьером Сулейманом, Фарбодом Фаршидианом и Марко Хантером из лаборатории робототехнических систем государственного исследовательского университета ETH Zurich.
“Учитывая высокоуровневые описания робота и объекта, а также спецификацию задачи, закодированную с помощью разреженной цели, – сказал Слейман, – наш планировщик целостно определяет, как робот должен двигаться, какие силы он должен прилагать, какие конечности он должен использовать, а также когда и где он должен установить или разорвите контакт с объектом.”
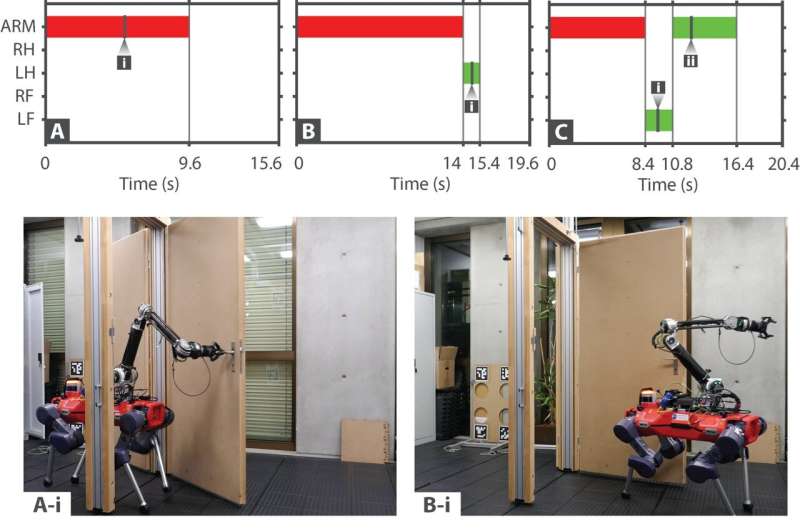
Демонстрационные видеоролики показывают, как четвероногий ANYmal от ANYbotics осваивает открывание дверцы посудомоечной машины, ловко открывает утяжеленную дверцу и удерживает ее открытой ногой во время маневрирования.
“Фреймворк может быть легко адаптирован к различным типам мобильных манипуляторов”, – сказал Сулейман.
За последние несколько лет были достигнуты большие успехи в разработке роботов. Компания Boston Dynamics, ведущий игрок в области робототехники, создала Atlas в 2013 году. Обладая стереовидением и мелкой моторикой, он мог сохранять равновесие во враждебной среде. Со временем он был усовершенствован для того, чтобы садиться в транспортные средства и выходить из них, открывать двери и обращаться с силовым оборудованием. Кэсси из Agility Robotics в 2016 году продемонстрировала превосходную способность к ходьбе и бегу.
В 2017 году реалистичная София, которая плавно имитировала человеческие жесты и поведение, была отправлена помогать пожилым людям в учреждениях по уходу за больными и играть с детьми. А высокоразвитая тактильная манипуляция была продемонстрирована в 2019 году с помощью Dactyl от OpenAI: после тренировок, на которые, по оценкам разработчиков, у людей ушло бы 13 000 лет, Dactyl одной рукой мог легко манипулировать кубиком Рубика и решать трехмерную комбинационную головоломку, которая ставила в тупик миллионы пользователей с момента ее выпуска в 1974 году, всего за четыре минуты.
Архитектура планирования и управления для многоконтактного локоманипулирования.
Совсем недавно, за последние несколько лет, появился четвероногий робот Boston Dynamics, который может проходить три мили, взбираться на холмы, преодолевать препятствия и выполнять специализированные задачи. А Ameca, считающийся одним из самых — если не самым —реалистичных роботов, непринужденно ведет беседу и генерирует выражения лица и жесты рук, удивительно похожие на человеческие.
ETH Zurich, которая унаследовала грандиозные достижения своих предшественников и устранила — или, по крайней мере, значительно уменьшила — необходимость в том, чтобы люди управляли роботами за кулисами, сделала ключевой шаг на следующем этапе разработки роботов.